

 联系我们
联系我们

一.干涉的定义
| 机器人的部件损坏 |
任何因干涉而造成的不良后果,都将为客户带来不 可估计的损失! |
| 机器人程序混乱 | |
| 加工中的工件损坏 | |
| 周边其他设备设施的损坏 |
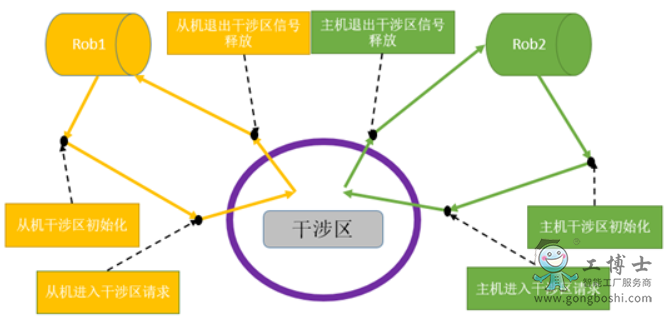
二.干涉区间
| 1 |
Rob1机器人进入干涉区前,发送从机欲进入干涉区的请求信号,并检测Rob2作为主机是否发送欲进入干涉区的请求信号。如果主机Rob2进入干涉区的请求信号被激活,无论此时Rob2进入或则即将进入干涉区,此时Rob1都将停止运动并等待Rob2完成运动退出干涉区。 |
| 2 | 如果Rob1和Rob2同时发出欲进入干涉区的请求信号,Rob2机器人优先进入,此时Rob1都将停止运动并等待Rob2完成运动退出干涉区。 |
| 3 |
如果Rob1作为从机已进入干涉区时,Rob2若想进入干涉区,Rob2必须停止运动并等待Rob1完成运动退出干涉区。 |
创建名为Interlock的程序主要适用于存在有关联的机器人组之间互锁,该程序包含源代码SRC文件和数据文件DAT两个文件:
1.Interlock.dat数据文件说明:
①枚举类型互锁指令E_LOCKTYPE:
GLOBAL ENUM E_LOCKTYPE ENTER_LOCK_M,ENTER_LOCK_S,LEAVE_LOCK,CYC_CONTROL,RESET_LOCK
|
互锁命令 |
说明 |
|
ENTER_LOCK_M |
作为主机器人进入干涉区 |
|
ENTER_LOCK_S |
作为从机器人进入干涉区 |
|
LEAVE_LOCK |
机器人退出干涉区 |
|
CYC_CONTROL |
激活干涉区监控中断 |
|
RESET_LOCK |
初始化并释放干涉区 |
②结构体型互锁信号S_LOCKSIG:
GLOBAL STRUC S_LOCKSIG INT ROB_IN,INT ROB_OUT
|
互锁信号 |
说明 |
|
ROB_IN |
其他机器人许可当前机器人进入干涉区的输入信号:TRUE表示许可 |
|
ROB_OUT |
当前机器人进入干涉区请求的输出信号:FALSE表示请求 |
③用于诊断的当前机器人激活干涉区号zLockNumber:
GLOBAL INT zLockNumber=3④干涉区监控的中断及循环旗帜的定义:
GLOBAL CONST INT czCollInterrupt=1 ;定义干涉区监控的中断等级GLOBAL CONST INT czCycCollision=1 ;定义干涉区监控的循环旗帜号
⑤信号安全检测时间,与SPS扫描周期:
GLOBAL CONST REAL crDeadtime=0.200000003 ;信号安全检测时间,与SPS扫描周期⑥干涉区互锁信号:
SIGNAL giRobotInterlock $IN[89] TO $IN[104] ;许可当前机器人进入干涉区的输入信号组SIGNAL goRobotInterlock $OUT[89] TO $OUT[104] ;当前机器人进入干涉区请求的输出信号组DECL S_LOCKSIG TABLE_LOCK[16] ;定义机器人干涉区的互锁表TABLE_LOCK[1]={ROB_IN 89,ROB_OUT 89} ;机器人干涉区的互锁1TABLE_LOCK[2]={ROB_IN 90,ROB_OUT 90} ;机器人干涉区的互锁2TABLE_LOCK[3]={ROB_IN 91,ROB_OUT 91} ;机器人干涉区的互锁3TABLE_LOCK[4]={ROB_IN 92,ROB_OUT 92} ;机器人干涉区的互锁4TABLE_LOCK[5]={ROB_IN 93,ROB_OUT 93} ;机器人干涉区的互锁5TABLE_LOCK[6]={ROB_IN 94,ROB_OUT 94} ;机器人干涉区的互锁6TABLE_LOCK[7]={ROB_IN 95,ROB_OUT 95} ;机器人干涉区的互锁7TABLE_LOCK[8]={ROB_IN 96,ROB_OUT 96} ;机器人干涉区的互锁8TABLE_LOCK[9]={ROB_IN 97,ROB_OUT 97} ;机器人干涉区的互锁9TABLE_LOCK[10]={ROB_IN 98,ROB_OUT 98} ;机器人干涉区的互锁10TABLE_LOCK[11]={ROB_IN 99,ROB_OUT 99} ;机器人干涉区的互锁11TABLE_LOCK[12]={ROB_IN 100,ROB_OUT 100} ;机器人干涉区的互锁12TABLE_LOCK[13]={ROB_IN 101,ROB_OUT 101} ;机器人干涉区的互锁13TABLE_LOCK[14]={ROB_IN 102,ROB_OUT 102} ;机器人干涉区的互锁14TABLE_LOCK[15]={ROB_IN 103,ROB_OUT 103} ;机器人干涉区的互锁15TABLE_LOCK[16]={ROB_IN 104,ROB_OUT 104} ;机器人干涉区的互锁16
2.Interlock.src源程序文件说明:
①Interlock源程序包含以下子程序:
|
子程序名 |
说明 |
|
ANTI_COLLISION |
互锁程序 |
|
STOP_ROB |
互锁程序中的中断程序 |
|
Msg_Anticoll |
互锁激活的信息提示程序 |
|
SetMsg |
设置信息提示的程序 |
②互锁程序ANTI_COLLISION(eiLockType:IN,ziLockNum:IN):
|
传递参数 |
类型 |
取值 |
说明 |
|
eiLockType |
E_LOCKTYPE |
#ENTER_LOCK_M |
作为主机请求进入干涉区 |
|
#ENTER_LOCK_S |
作为从机请求进入干涉区 |
||
|
#LEAVE_LOCK |
离开干涉区 |
||
|
#CYC_CONTROL |
干涉区初始化:激活互锁中断 |
||
|
#RESET_LOCK |
干涉区初始化:重置输出信号 |
||
|
ziLockNum |
INT |
1…16 |
互锁序号:与TABLE_LOCK相对 |
●#ENTER_LOCK_M程序逻辑:
| 1 | 禁用干涉区监控中断; |
| 2 |
判断从站机器人是否已在该干涉区: 1.若该值为真,表示与之对应的机器人不在该干涉区,此时输出进入干涉区请求信号假值; 2.若该值为假,则表示与之对应的机器人在该干涉区,此时中间变量nbOK置为假,并提示信息-主机该干涉区被其他从机器人激活,并等待从站机器人在该干涉区的信号为真,输出从站机器人在该干涉区激活多久的信息;在循环中等待从站机器人在该干涉区的信号为真,此时输出进入干涉区请求信号; |
| 3 |
激活干涉区监控中断; |
●#ENTER_LOCK_S程序逻辑:
| 1 |
禁用干涉区监控中断 |
| 2 |
中间变量nbOK置为假,并提示信息-该干涉区被主机器人激活,进入循环判断,判断主机器人是否已激活 该干涉区: 若该值为真,输出进入干涉区请求信号假值;等待一个时间在判断判断主机器人激活该干涉区:如果该值为真,则将中间变量置真,并退出循环;若该值为假,则将输出进入干涉区请求信号真值,让主机器进入干涉区,该从机器人继续等待主机器人激活该干涉区值为真; |
| 3 | 输出进入干涉区请求信号假值; |
| 4 |
激活干涉区监控中断; |
●#LEAVE_LOCK程序逻辑:
| 1 | 如果机器人不在路径上,则等待机器人在路径上; |
| 2 | 输出进入干涉区请求信号真值; |
●#RESET_LOCK程序逻辑:
| 1 |
等待机器人在路径上; |
| 2 | 输出进入干涉区请求信号真值; |
●#CYC_CONTROL程序逻辑:
| 1 |
定义因互锁引起的停机中断; |
| 2 | 关闭中断; |
| 3 |
定义中断中的循环旗帜; |
| 4 | 开启中断; |
| 5 |
激活中断; |
代码:
DEF Interlock( )END;-------------Interlock Active----------------------GLOBAL DEF ANTI_COLLISION(eiLockType:IN, ziLockNum:IN)DECL E_LOCKTYPE eiLockTypeDECL INT ziLockNumDECL BOOL nbOKCONTINUEIF VARSTATE("ziLockNum")<>#INITIALIZED THENMsgQuit("Lock area not initialized")HALTELSEIF ziLockNum>16 OR ziLockNum<1 THENMsgQuit("Lock area msut be 1 to 16!")HALTENDIFENDIFSWITCH eiLockType; --- Enter Collision Zone as Master ---CASE #ENTER_LOCK_MWAIT SEC 0INTERRUPT DISABLE czCollInterrupt ; Disable MonitoringIF ($IN[TABLE_LOCK[ziLockNum].ROB_IN]) THEN$OUT[TABLE_LOCK[ziLockNum].ROB_OUT]=FALSEELSEnbOK=FALSEMSG_ANTICOLL(ziLockNum)REPEATIF ($IN[TABLE_LOCK[ziLockNum].ROB_IN]) THENnbOK=TRUEELSEnbOK=FALSEENDIFWAIT SEC 0.01 ; Sampling 100 msUNTIL (INSTRUCTION_OK==TRUE)$OUT[TABLE_LOCK[ziLockNum].ROB_OUT]=FALSEENDIFINTERRUPT ENABLE czCollInterrupt ; Enable Monitoring; --- Enter Collsion Zone as Slave ---CASE #ENTER_LOCK_SWAIT SEC 0INTERRUPT DISABLE czCollInterrupt ; Disable MonitoringnbOK=FALSEMSG_ANTICOLL(ziLockNum)REPEATIF ($IN[TABLE_LOCK[ziLockNum].ROB_IN]) THEN$OUT[TABLE_LOCK[ziLockNum].ROB_OUT]=FALSEWAIT SEC crDeadtimeIF ($IN[TABLE_LOCK[ziLockNum].ROB_IN]) THENnbOK=TRUEELSEnbOK=FALSE$OUT[TABLE_LOCK[ziLockNum].ROB_OUT]=TRUEENDIFENDIFWAIT SEC 0.01 ; Sampling 100 msUNTIL (nbOK==TRUE)$OUT[TABLE_LOCK[ziLockNum].ROB_OUT]=FALSEINTERRUPT ENABLE czCollInterrupt ; Enable Monitoring; --- Leave Collision Zone ---CASE #LEAVE_LOCKCONTINUEIF NOT $ON_PATH THENWAIT FOR $ON_PATHENDIFTRIGGER WHEN DISTANCE=1 DELAY=0 DO $OUT[TABLE_LOCK[ziLockNum].ROB_OUT]=TRUE; --- Initialize Collision Zone ---CASE #RESET_LOCKWAIT SEC 0WAIT FOR $ON_PATH$OUT[TABLE_LOCK[ziLockNum].ROB_OUT]=TRUE; --- Prepare for permanent Monitoring---CASE #CYC_CONTROLGLOBAL INTERRUPT DECL czCollInterrupt WHEN NOT $CYCFLAG[czCycCollision] DO STOP_ROB( )INTERRUPT OFF czCollInterrupt$CYCFLAG[czCycCollision]=TRUE$CYCFLAG[czCycCollision]=(((goRobotInterlock B_EXOR 'B1111111111111111') B_AND giRobotInterlock) == (goRobotInterlock B_EXOR 'B1111111111111111'))INTERRUPT ON czCollInterruptINTERRUPT ENABLE czCollInterrupt; --- WARNING: Program Failure Interlocks ---DEFAULTHALTMsgNotify("Unknown Collision Setting!Please Switch Ti Mode!")WAIT FOR $T1ENDSWITCHENDGLOBAL DEF STOP_ROB ( ); *** Stop Movement by Interlock Monitoring***BRAKEsetmsg (99,3,0)WAIT FOR $CYCFLAG[czCycCollision]ENDGLOBAL DEF Msg_Anticoll(ziLockNum :IN)DECL INT ziLockNumDECL REAL nrTimernrTimer=0.0zLockNumber=ziLockNum;Message Outputsetmsg (ziLockNum,1,nzTimer)$TIMER_STOP[20]=TRUE$TIMER[20]=0$TIMER_STOP[20]=FALSEREPEATWAIT sec .01UNTIL ($IN[TABLE_LOCK[ziLockNum].ROB_IN])==TRUE$TIMER_STOP[20]=TRUEnrTimer=$TIMER[20]nrTimer=nrTimer/1000.0setmsg (ziLockNum,2,nrTimer)ENDGLOBAL DEF SetMsg(ziLockNum:IN,ziMsg:IN,riPar:IN )DECL KrlMsg_T MsgDECL KrlMsgPar_T Par[3]DECL KrlMsgOpt_T OptDECL INT nzHandleDECL INT ziLockNum, ziMsgDECL REAL riPar;selec Msssage Text---------------------SWITCH ziMsgCASE 1 ;Interlock is ActiveMsg = {Modul[] "Interlock", Nr 007, Msg_txt[] "Interlock Area %1 is Active!"}CASE 2 ;Interlock was activeMsg = {Modul[] "Interlock", Nr 008, Msg_txt[] "Interlock Area %1 was active %2[s] ago!"}CASE 3 ;Interlock Cycflag has triggeredMsg = {Modul[] "Interlock", Nr 009, Msg_txt[] "Collision Monitoring has Triggered!"}ENDSWITCH;Configuration of message parameter --------Par[1] = {PAR_TYPE #VALUE, PAR_INT 0}Par[1].PAR_INT = ziLockAreaPar[2] = {PAR_TYPE #VALUE, PAR_REAL 00.0}Par[2].PAR_REAL = riPar;Message Options ------------------------------------Opt = {Vl_STOP FALSE, CLEAR_P_RESET TRUE, CLEAR_P_SAW FALSE, LOG_TO_DB TRUE};Message generation---------------------------nzHandle = SET_KRLMSG (#NOTIFY, Msg, Par[], Opt)END
四.互锁信号程序的使用:
1.初始化干涉监控:
ANTI_COLLISION(#CYC_CONTROL,0 )2.重置并释放干涉区信号-依据自己需求:
ANTI_COLLISION(#RESET_LOCK,1)ANTI_COLLISION(#RESET_LOCK,2)ANTI_COLLISION(#RESET_LOCK,3)ANTI_COLLISION(#RESET_LOCK,4)ANTI_COLLISION(#RESET_LOCK,5)ANTI_COLLISION(#RESET_LOCK,6)ANTI_COLLISION(#RESET_LOCK,7)ANTI_COLLISION(#RESET_LOCK,8)
3.进入干涉区:
-作为主机器人进入:
ANTI_COLLISION(#ENTER_LOCK_M,3)ANTI_COLLISION(#ENTER_LOCK_M,4) ;三台机器人同时进入该区域ANTI_COLLISION(#ENTER_LOCK_M,5)
-作为从机器人进入:
ANTI_COLLISION(#ENTER_LOCK_S,3)ANTI_COLLISION(#ENTER_LOCK_S,4) ;三台机器人同时进入该区域ANTI_COLLISION(#ENTER_LOCK_S,5)
复杂的互锁建议***好由PLC来统一处理;
4.退出干涉区:
ANTI_COLLISION(#LEAVE_LOCK,3)
五.说明:
本文主要讲述***优先干涉区的设定,此种方法必须区分主次关系,主机器人获得***的优先处理的权力,而从机器人在遇到主从机器人同时进入干涉区时,获得的优先级低于主机器人,必须等待主机器人处理完退出干涉区之后才能进入。